IAD
-
Posts
480 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Gallery
Everything posted by IAD
-
I'd try something like "rotate the left-hand stick upwards"... Maybe "rotate the throttle to the right"..? ~Luke
-
The CAD model I'm working on is designed to fly... It has appropriate intake/exhaust areas, provision for retracts, etc... So, yes, I am planning on making a -22, after the larger SV. (But, if the CNC mill handles the SV well, I may end up building them at the same time. Big IF, though.) They'd both be around 1:16, the VF-22 would be a couple inches longer than true scale, to allow me to fit everything in it. ~Luke
-
Ah, a few hours on an electric aileron trainer, and it would all come back. Flying is like riding a bike! ~Luke
-
ELINT is NOT a Macross-only term... It's Electromagnetic Intelligence, and a very real field. The Slyph was an ELINT aircraft... In the first episode, the downward facing fin (antenna) was stowed immediately after they completed monitoring the battle. When they chased the phantom Slyph, the antenna was retracted. You could argue landing gear are also liability... Extended at the wrong time, they can rip off, add a lot of drag, etc... But that's why you retract them. Though taken to the extreme in these cases, you can't just take an antenna and make it smaller, without losing specific characteristics... The required size is dependent on a number of factors, but... After all, there is a reason that AWACs have huge radomes, and (real-life) ELINTs have their antenna farms. http://www.defenseindustrydaily.com/images...uardrail_lg.jpg (And also why cell towers are towers, and not little black boxes hidden away out of sight, which would definitely be nicer.) The VE-1 had a radome... (Now, technically, that makes it more of an AWAC....) ~Luke
-
Another semester almost finished; I'm starting to think about summer projects. (Already started writing the SV CNC toolpath! Probably should be studying instead.......) I've decided to do what the toy guys do... Stick with one scale. Mine will be 1:16. ~Luke

-
"Cobra's only because their thrust-to-weight is too high..." Sacrilage! There is NO such thing as too much thrust! The big fin is an ELINT antenna, isn't it? Both the Slyph and the RVF-25 were electronic warfare/intelligence aircraft, after all. ~Luke
-
I disagree, aerodynamically, for roughly symmetrical body (in the aerodynamic sense of the word, wings, fuselage, etc.), "lift" is arbitrarily said to be "up"... "Lifting" down is just as easy as lifting up... Easier, in fact, since you get a 9.81 m/s^2 downward boost. As for whether the Yukikaze should be considered a roughly symmetrical body... With the number full-flying control surfaces (canards, wings, tails) I'd say it's close enough. Even if all the surfaces were simple flat plates, the "lift" generated would be more than enough to achieve the pitch rates needed. Now, what is true is that pilots red out a lot easier than they black out... Thus, in real life, nobody ever snaps their nose down as fast as they do pulling up. By extension, airframes are designed with much lower negative G tolerance, since the pilot is the weak link there anyway... (One more incentive never to pitch down that fast.) What you say is particularly true for fly-by-wire, since the computers ensure the pilot can't overstress the airframe. As for RC/real life... Definitely, that's why nobody's done a real cobra with a model Su-37, etc... However, it's also true that the Yukikaze is a horrible design in real life, so I have little interest in whether a "real" version could perform a given maneuver... But whether a model could be made to is definitely a point of interest. ~Luke
-
From a 'real physics' standpoint, the diving inverted flip is NOT impossible, assuming the pilots don't red out... The maneuver is certainly no more 'super robot' than the whole concept of a transforming fighter jet. As I see it, you'd push the nose over, hold the dive for a second to build speed, and then bury the stick in the upper stop. With enough thrust-vector power, you'd stall the wings out while still diving (angle of attack is with reference to velocity vector, not horizon), but the momentum would continue to carry you downwards, countered only by the drag generated by the now-stalled wings. Continue holding the forwards stick, and the thrust vector will pivot the aircraft around its center of mass. As the nose passes vertical, the engine thrust should help decrease the descent rate, and as a result, the effective angle of attack. Timed precisely, your wings would start generating lift again just as you came to about 10 deg. nose up, at which point, you let off the forwards stick, and fly out. Unfortunately, on a small model, the ratio of inertial/aerodynamic forces is low, so the drag of the stalled wings would tend to overcome the downward momentum very easily, preventing the aircraft from falling uniformly while pitching the nose around... So, obviously, a big model would be needed! ~Luke
-
Yep, that's just it, while none of the VFs are particularly efficient, they nevertheless can still be made to fly reasonably well. (At a small [light] scale, anyway.) The flip is definitely a 'must-do' maneuver... Fortunately, the rotating wings aren't technically required to pull it off. Enough mass, enough thrust, and enough thrust-vector travel should do the job just fine. The carrier launch is more challenging, since the thrust/weight ratios required for the fast vertical climb are hard to achieve in a 'jet' model... (Turbines might work, or just hide a couple pusher propellers on it somewhere.) Hovering isn't too bad, even with turbines: (2:20, but the whole thing is worth a watch.) The Silphs are fine planes, in terms of aerodynamics... A little short-coupled, and a lot of side area ahead of the CG, but generous intake area, which is good for EDFs. ~Luke
-
There is a thread here, under Fan Works... http://www.macrossworld.com/mwf/index.php?showtopic=15665 It's quite long, but pretty comprehensive. Regarding the VF-1... I've posted this list before, but in my opinion, the following VFs could be made to fly very well as RC ships, while keeping true-to-lineart outlines: VF-0A/D/S (-0D would be easiest), VF-1, VF-4, VF-11, YF-19/VF-19 (did some work on this, it flew, but it was just a pusher-prop job), YF-21/VF-22 (want to do the latter), VF-17/171, VF-25, VF-27.... Pretty much everything except the Plus Ghost? (And even that could be done, given great attention to weight, and gross excess of thrust.) Kawamori's designs are pretty reasonable, when it comes to making them fly as models... They have lots of (unnecessary) drag, but they do have enough stabilizer/wing area (in the right places), decent-sized intakes/exhausts, and enough control surfaces to make them work in the end. (Which is more than can be said for the FRX-99 Yukikaze... Which I still want to build/fly one day.) ~Luke
-
As the guy who built the RC SVs, I can attest that the wings are lineart accurate, traced directly from the Hasegawa model 2-views. The wings on the SV are pretty decent; proportionately they are not that much different from an F/A-18 or an SU-37. Keep in mind that with the thrust/weight ratios VFs are supposed to have, combined with 2D/3D thrust-vectoring, wing size becomes somewhat irrelevant, except for conventional (horizontal) takeoff and landing... The way VFs fly in air combat, the wing would be stalled out most of the time anyway. ~Luke
-
I agree with Sketch, with the thrust vector travel and thrust numbers on these things, realistically, they would definitely tend to pivot, more than arc, in a hard pull-up. Personally, I like it. Very Macross-y. ~Luke
-
Muhahaha! There can be only... Errr... Never mind. Checked the landing gear geometry last night... It will need either 90 deg. rotation types, or a custom Flanker-style angled axis design. The fuselage isn't deep enough to allow the gear to retract straight in. To keep the servo count low(er), I'm thinking that electrically-driven retracts might be a good plan. This one could take a lot of rigging, though... Right now, it looks like it'll need about 8-9 servos, for a 'nicely equipped' ducted fan setup: Thrust-vector (2 + Differential throttle) Flaperons (2) Rudders/ruddervators (1-2) Canards (2) Fin retracts/gear doors (0-1, depending on mechanics) Retracts (0-1, using electric units; depends on switching technique) While the two-servo setup used on the smaller SV could theoretically work, the pushrods would be VERY long, introducing the potential for a lot of slop. Maybe something in between would be the best compromise between precision and cost. ~Luke
-
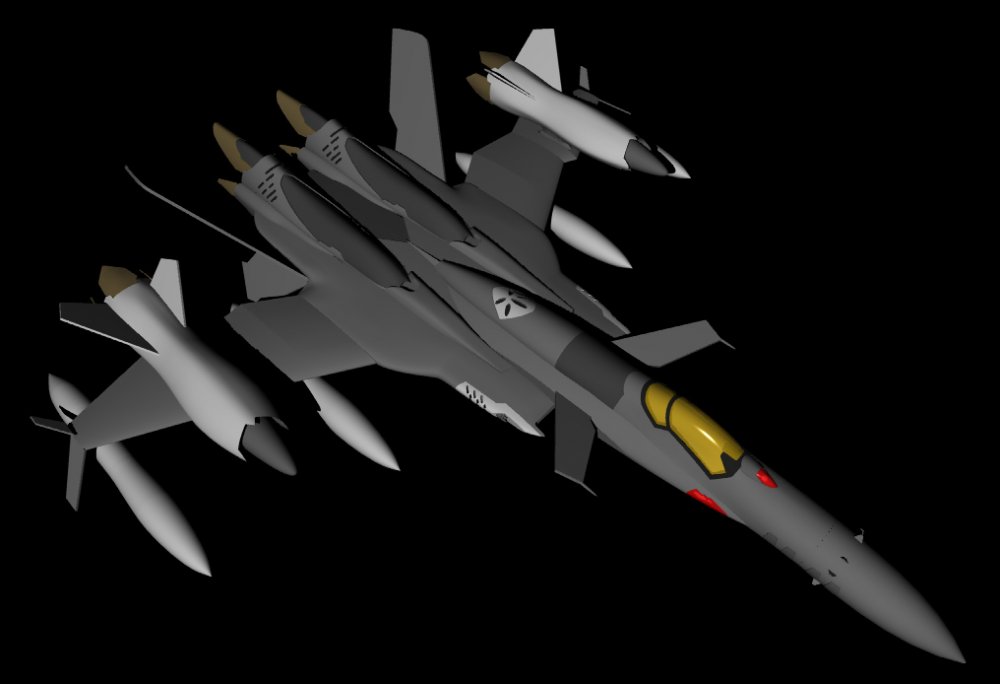
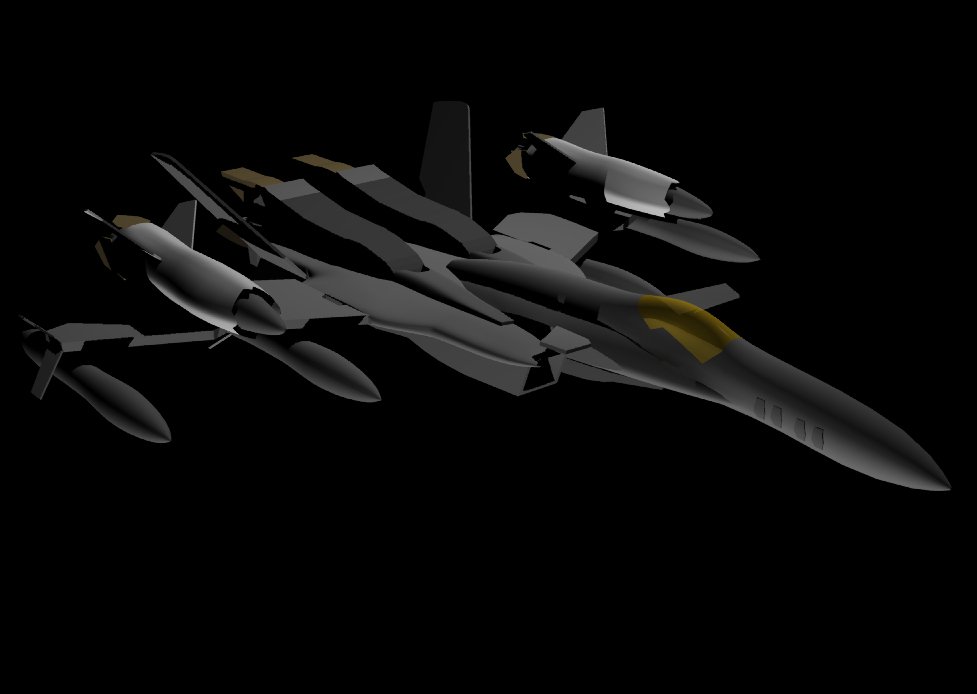
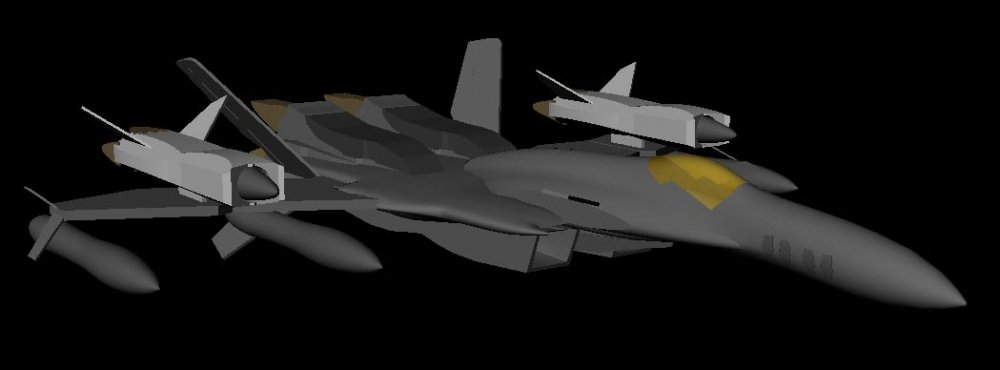
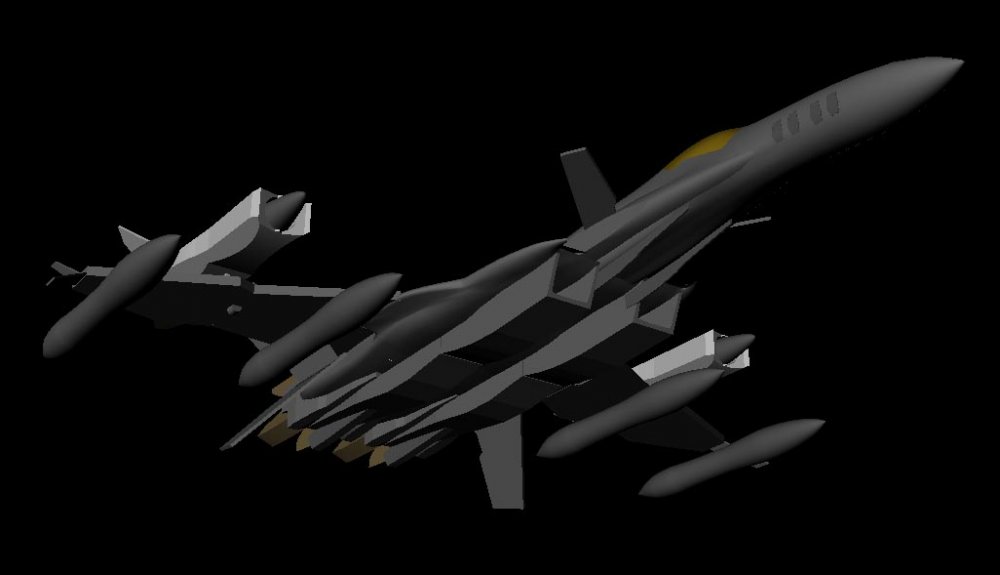
Almost finished... I think it captures the look. Still needs some cockpit detail, and the ducting needs reworking... Wings-wise, I put a MH-32 airfoil on it... Should be more efficient than a flat plate, especially at higher speeds. Not so important for the prop version, but the fans like a clean airframe. ~Luke


-
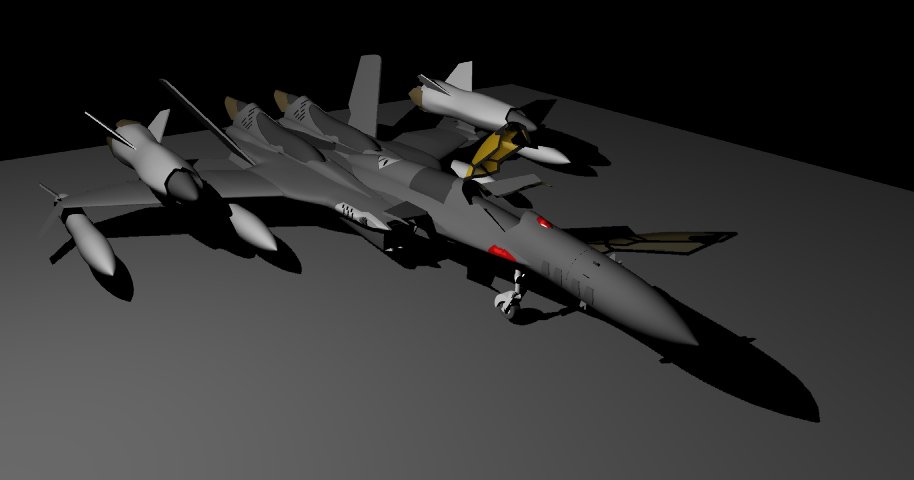
Hehe... Yeah, everybody waiting to see if I'll crash, right? More work done on the CAD model, finally got some work done on the nacelles/legs... ~Luke


-
Motors in the boosters... That depends on what sort of power system I go with, but they do provide the perfect location to "hide" a pair of pusher props. (Yep, Schizophrenic, props. ) As I said before, I always liked the thrust, but never could find a good spot for them. I've come up with a set that will give me about 4 lb. of thrust, and 80 MPH top speed, with pitch/roll/yaw thrust-vector... Should do. I'll probably build a 'plain' version, to put the ducted fans in, as well... After all, I did a lot of design work to get the ducting right. VF-25: Wouldn't an RC VF-27 be more appropriate? (I could even put a video downlink, so I could fly by virtual cockpit... ) Really, though, I didn't much like the M-F designs... Just a personal preference... I was sort of figuring I'd do a VF-0 (S or D), once I got the SV out of my system. ~Luke
-
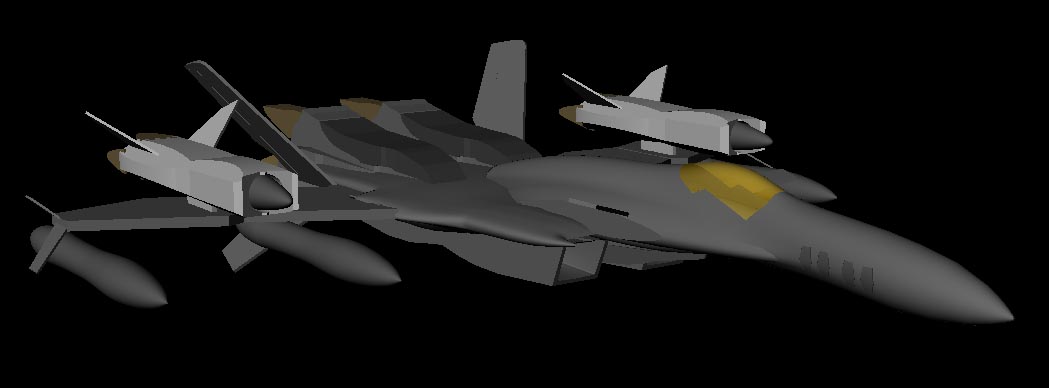
Continuing my slow rework of the CAD model... I've decided to go with Yamato-style boosters, instead of the somewhat-flattened Hasegawa ones. This model is just for developing the CNC toolpaths, so the level of detail will be pretty low; it's the basic shapes that I'm after. Surface details (sensors, bumps, panels, etc.) will be added by hand, using bits of balsa/foam. ~Luke

-

THE UN-OFFICIAL COLOR SCHEME THREAD
IAD replied to the white drew carey's topic in Hall Of The Super Topics
SV drawings... Nope, not mine, but I used them a lot... ~Luke -
Klam, the VF-22 looks great! Quick question: Didn't the -22 have internal storage of the gunpods? I like the external mounts, myself. VERY nice job! ~Luke
-
Yes, non-transforming GERWALK would be reasonable... The weight of the fans, vector servos, etc. would probably be significant enough to actually keep most of the weight relatively low, and gyros/thermal sensors could be used to take care of the stability augmentation... Still, fixed pose would lack the overall 'living creature' feel that you get, watching the M0/MF aircraft in GERWALK. (You know, all the small twitch motions of the legs, etc.) ~Luke
-
That's hard. Maybe variable-geometry wings, first? ~Luke
-
Teaser... The old 'block' model is being reworked; CNC milling requires a more detailed CAD model. (Hand-carving a 5' long airframe doesn't appeal to me.) ~Luke
-
Now this is getting OT, but... Oh, I know what props can do... I considered using a pair of vector-thrust pusher props, but I would have needed extension shafts in order to clear the thrust-vector paddles, and it would have looked bad, no matter how you cut it. And let's face it, the only reason to build an SV-51 is good looks. In defense of the speed, keep in mind, those are 40mm dia. ducted fans, running on motors 0.5" in diameter, and the SV is a brick, aerodynamically. In a cleaner airframe, one of the things can push 70-80 MPH. Considering they weigh an ounce each, hardly lame. (And the Deltastorm is hardly fast. If I go twin pusher, I'm after no less than 100 MPH, with 2:1 thrust/weight ratio or better.) ~Luke
-
Props?! My SV(s) didn't/won't fly on stink'n props! Internal ducted fans, with functional vector paddles for pitch/roll thrust-vector for the win! ~Luke
-
Oh yeah. Full-flying canards, +/- 20 deg. on the old one, and I want +80/-45 deg. on the bigger one. Nope, I didn't get a video... But it's really pretty easy... Gauging when to tuck the nose under, so that you just come around and get your engines under you before you hit the ground is the tricky bit. (You can cheat a bit, and deploy the legs into GERWALK mode, if you're coming up short. I've got the legs slaved to the throttle stick on my HOTAS, with throttle on a rotary dial, to make things easier.) ~Luke