

IAD
-
Posts
480 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Gallery
Posts posted by IAD
-
-
Yes, except the latency on BLOS links can be pretty bad, and the current generation of gimballed sat-link antennas can't keep up with aggressive maneuvers... So, until you either take the man out of the loop, and go fully autonomous, or come up with some entirely new ultra-high-bandwidth, low-latency BLOS links, going to a UAS won't buy you an automatic maneuverability improvement.
~Luke
-
Thanks!
Keep in mind, this is over 5' long... I've never done casting, but I'm guessing the exotherm would play merry blazes with the final product.
~Luke
-
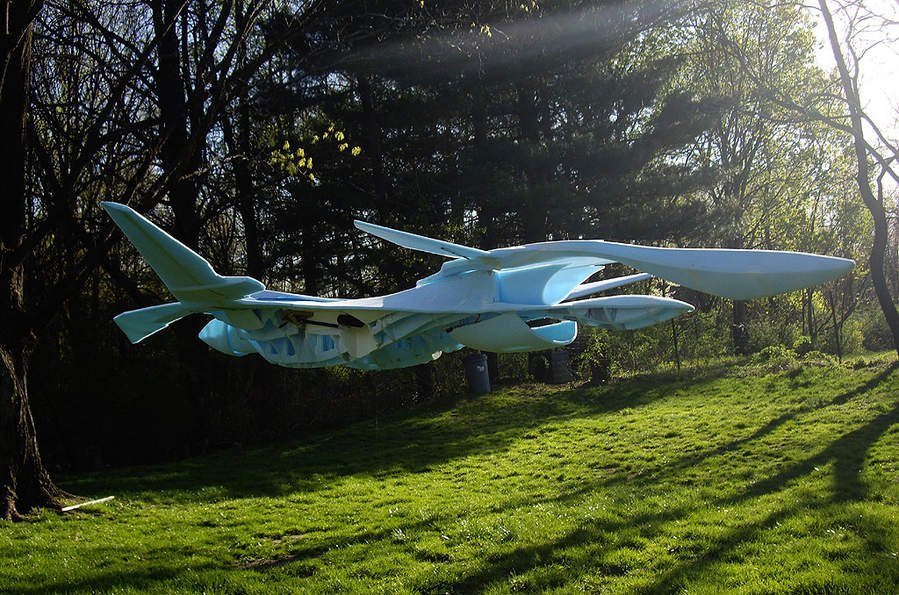
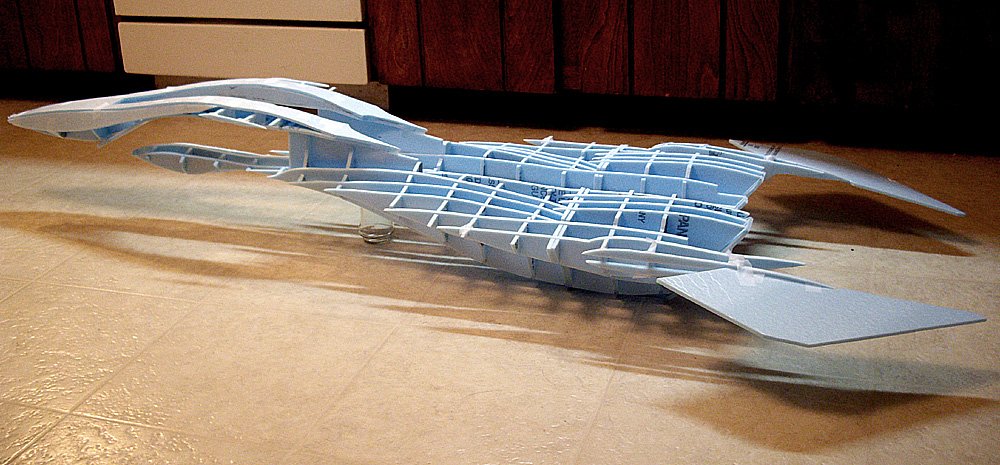
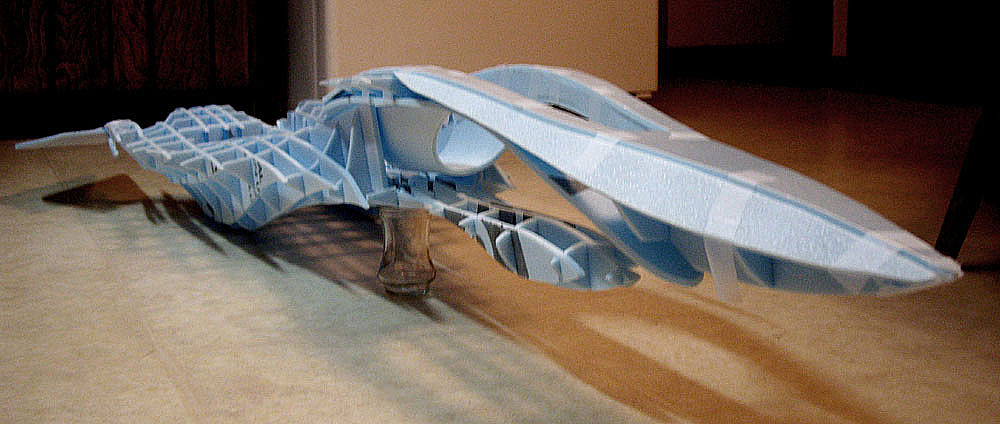
Thought you guys would appreciate these... 1/12th scale, 3.5 lb estimated AUW... Getting closer to flight-testing, but still a good few months out.
~Luke



-
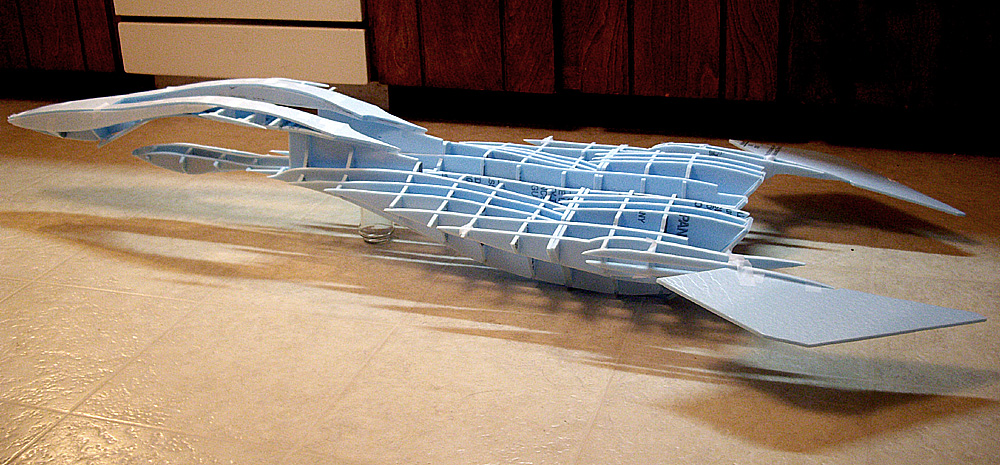
You're right, keep in mind the tops of the nacelles are not fitted/glued in place yet, so the slit intakes will be lower profile when all is said and done. They're only about 3/8"" deep, when everything is fitted down correctly. (I based my CAD model on the colored schematic you posted, with modifications up front to turn it back into a UCAV.)
The connector between the TARPS pod and the nose isn't installed yet, but will be there. I'd estimate I'm a good 2-3 months away from a the maiden flight, so there's a lot of stuff left to do.
Like I said, this is the UCAV (FRX-99 RAFE)... Thus the curved channel thingy. I figured an RC model of a UCAV had a certain novelty/irony to it... Maybe I'll even drop a TWOG autopilot in it, and actually make it a UAV.

~Luke
-
Re: the chin scoop... Yeah, that's what I figured. Just seems like a lot of drag.
The Platz is a resin kit, right?
~Luke
-
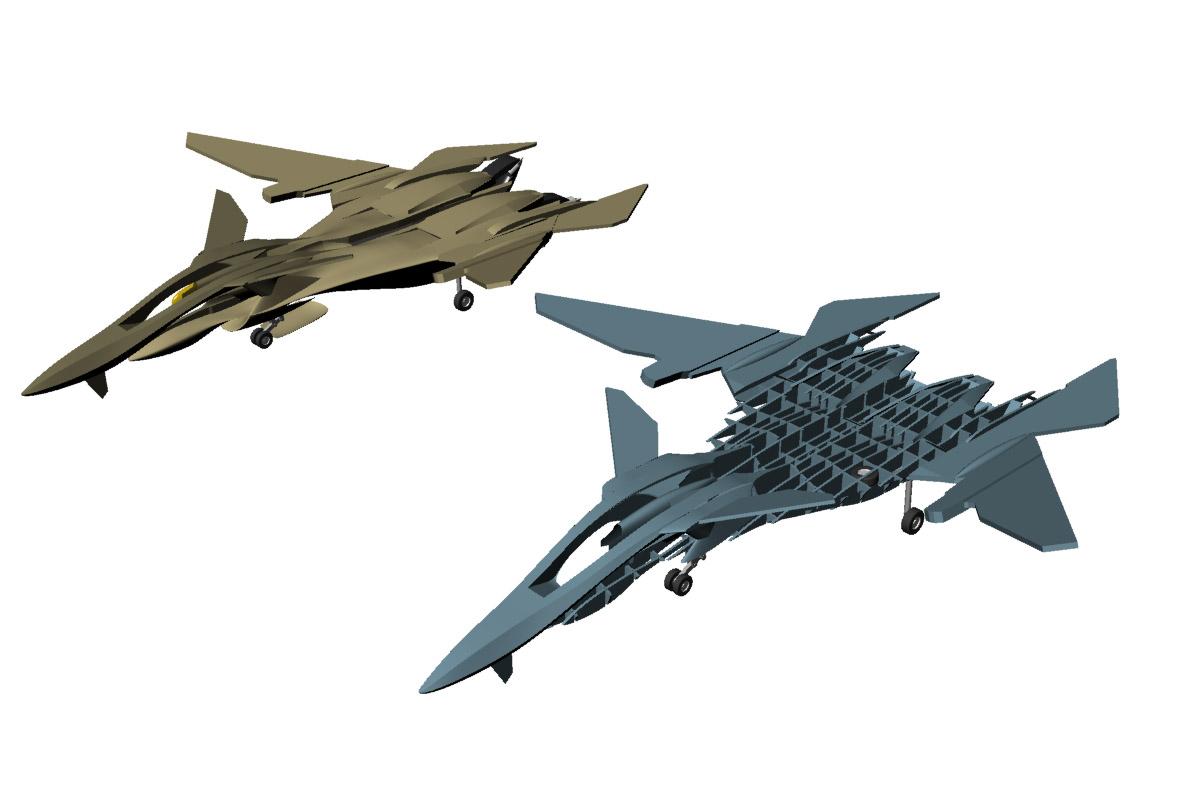
No worries, Sean, this is definitely a one-off.

It's actually not the ram-intake variant, which would have the two additional inlets above the top slit intakes, as well as flatter nacelles. I'm going for the 'vanilla' FRX-99; note the curved front intake channel, as opposed to the squared-off one the FRX-00 has.
Also, it's a prop-job, I'm after strong vertical performance, so EDFs were out.
I know, I know.... But come on, 5' long, custom retracts, 1:1 thrust/weight, and no vertical stabilizer... I had to cut corners somewhere!
~Luke
-
Nice! That's the Bandai 1/100th, right?
Actually, maybe you can help me out a bit... I'm still stuck on what the chin scoop is supposed to do... Seems like it just floats there? Are there any intakes inside of the scoop that would actually get some air to the engines?
Mine doesn't really fit on my workbench... But it's coming along... Slowly.
~Luke

-
That is pretty neat. The vertical destabilizer is definitely an unusual touch.
~Luke
-
Nope, variable-incidence wings got cut from this build... Issues with the forward-swept wings and actuator loads.
(And airfoils, and weight, and space, and.........) Still hoping to do the flip. Regarding reversers, I rest my case. (Thanks for the info David.) If an airliner can use high throttle in reverse, I'm SURE the FRX can. Speculation on the interface (slaved reversers on the HOTAS, etc.) is irrelevant, since whatever it was, it allowed the throttle setting to stay constant while the reversers were actuated. Just chalk it up to software/FBW magic. Maybe something like in YS Flight.
The point is, for a work of fiction, there are bigger issues with that scene than something as mundane as retracting the thrust reversers.
More on-topic: I've gone through a few different iterations of retracting landing gear... Even though it's not exactly accurate, I've returned to a canted-axis (SU-27 style) design. I built a two-axis unit, but to get the wheels into the bays (without hitting anything) was insanely difficult, whereas the canted axis swings both up and towards the centerline, making it much more suitable.
I'll post pictures shortly.
~Luke
-
Ok, wait..... Yes, drama, and all, but.... Thrust-reversed turbines do NOT spin in reverse!
Thrust-reversing occurs as fast as the reverser buckets can deploy/retract. Of all the problems with that scene, spool-up times are probably the lowest on the ladder... They could have been running at significant throttle setting with the thrust reverser buckets deployed, and just holding the brakes; given the absurd thrust/weight ratios (vertical acceleration to supersonic from a hover in a matter of seconds), hovering would occur at what, 33% throttle?
~Luke
-
Post-stall landing isn't that crazy... The landing was similar (in principle) to the tests performed with the X-31, only the variable-incidence wings allowed the FRX to remain relatively level prior to touchdown. The X-31 on the other hand had to fly with a 20+ deg. nose-up attitude, derotating just before touchdown.
The takeoff... Yeah... Never did figure out how they didn't scrape the bottom of the nacelles, as they fell off...
~Luke
-
Got start on the sheeting, and opened a thread over on RC-Groups:
http://www.rcgroups.com/forums/showthread.php?p=14063588
~Luke

-
You mean fall off a moving boat backwards, hover, and then climb out vertically, don't you?
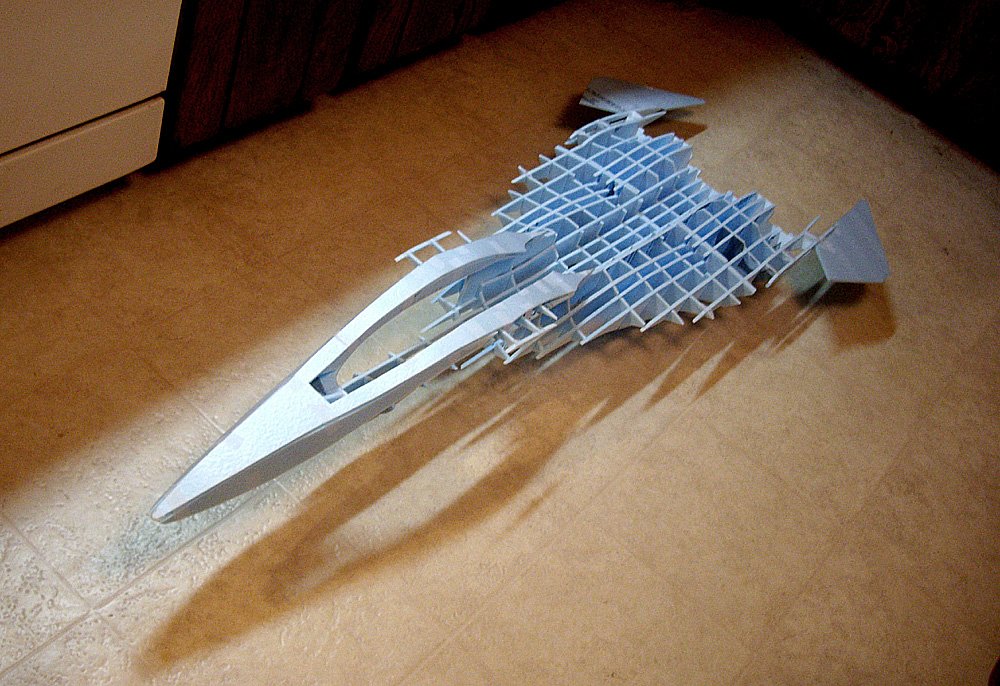
Gear arrived yesterday, and the frame is all glued up. Now for the tricky part: sheeting.

~Luke
-
Sure, once I get it... It's shipping from Hong Kong. About 100% cheaper that way, even counting shipping.
Got it coming via EMS, though, so it shouldn't take too long.
~Luke
-
Yeah, big deal, this year has just started!
J/K~Luke
-
Yeah, basically.
Looks even better with wings/canards!I bought most of the electronics today... A heading-hold gyro, a 4s 2450 mAH 30C LiPoly battery pack, speed controllers, and almost a dozen servos.
~Luke
-
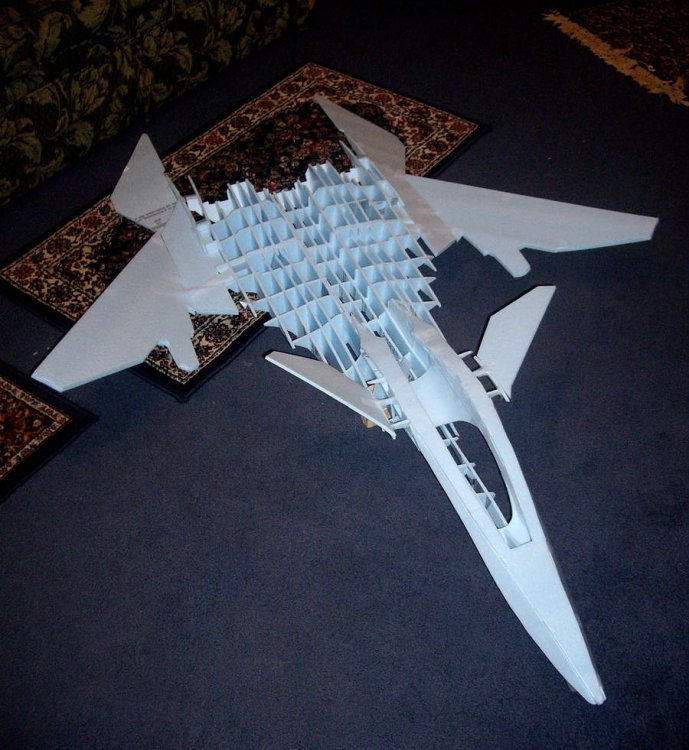
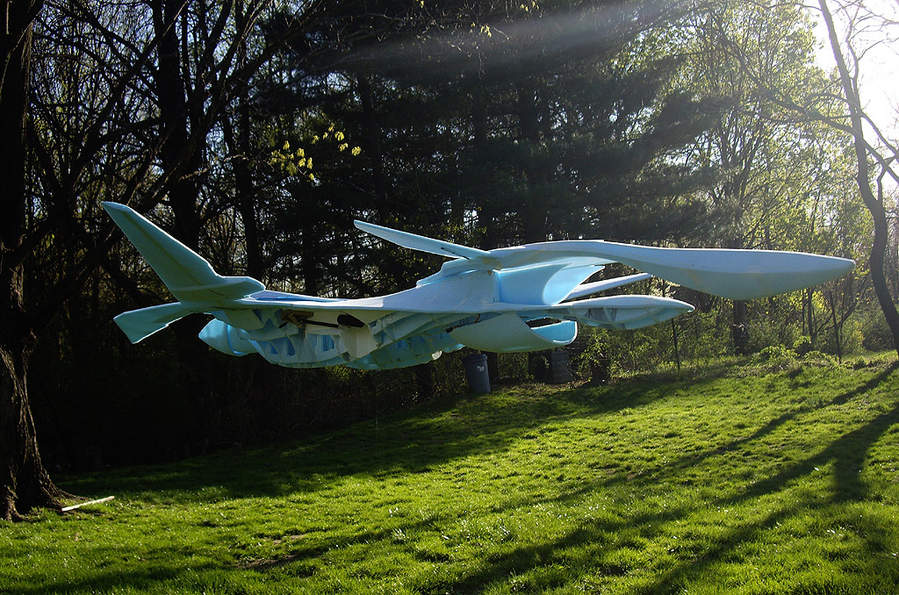
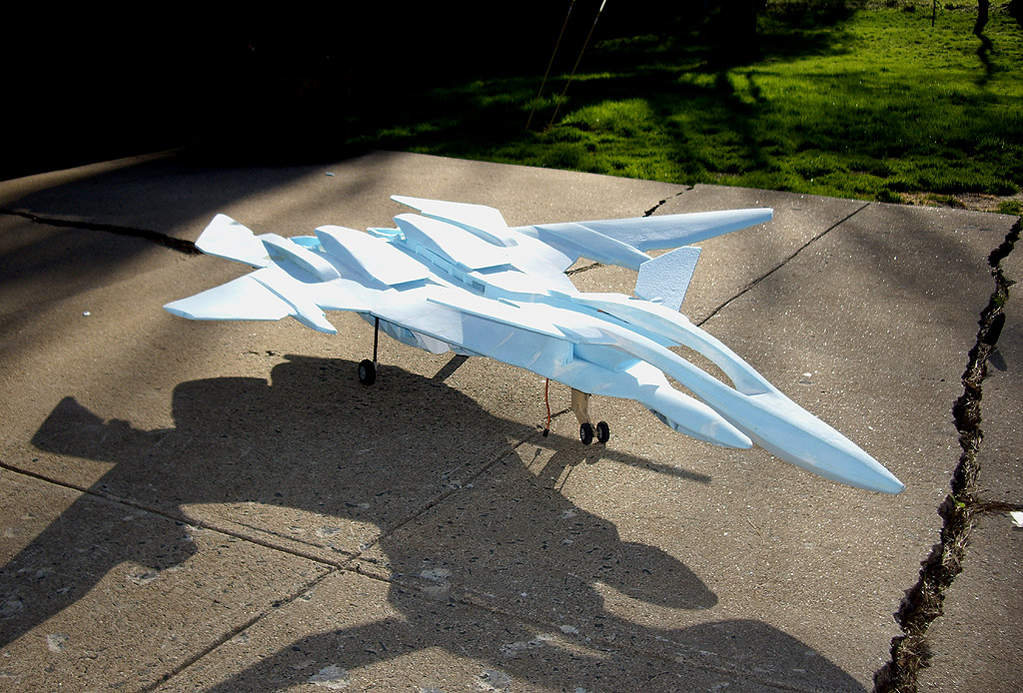
As promised. 63" long, and going as planned. (Except for a minor issue where the nose connects to the fuselage; small error in the CAD file.)
No glue yet, just trial-fitting the parts.
~Luke
-
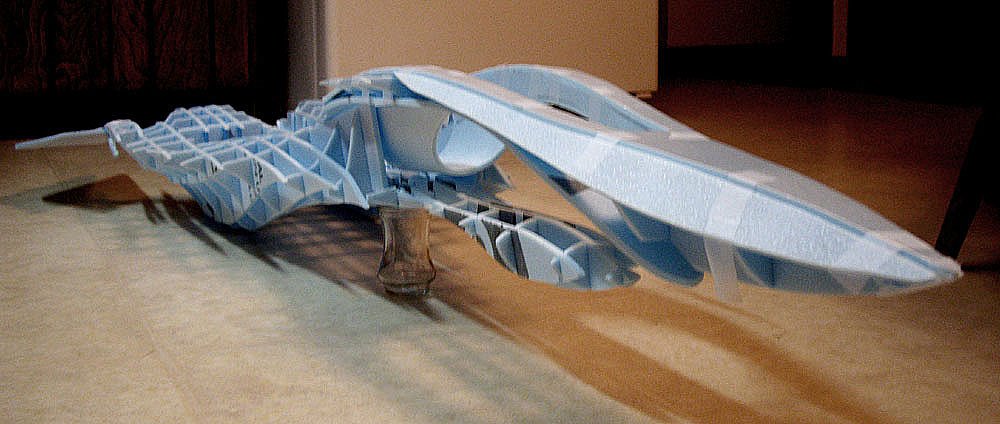
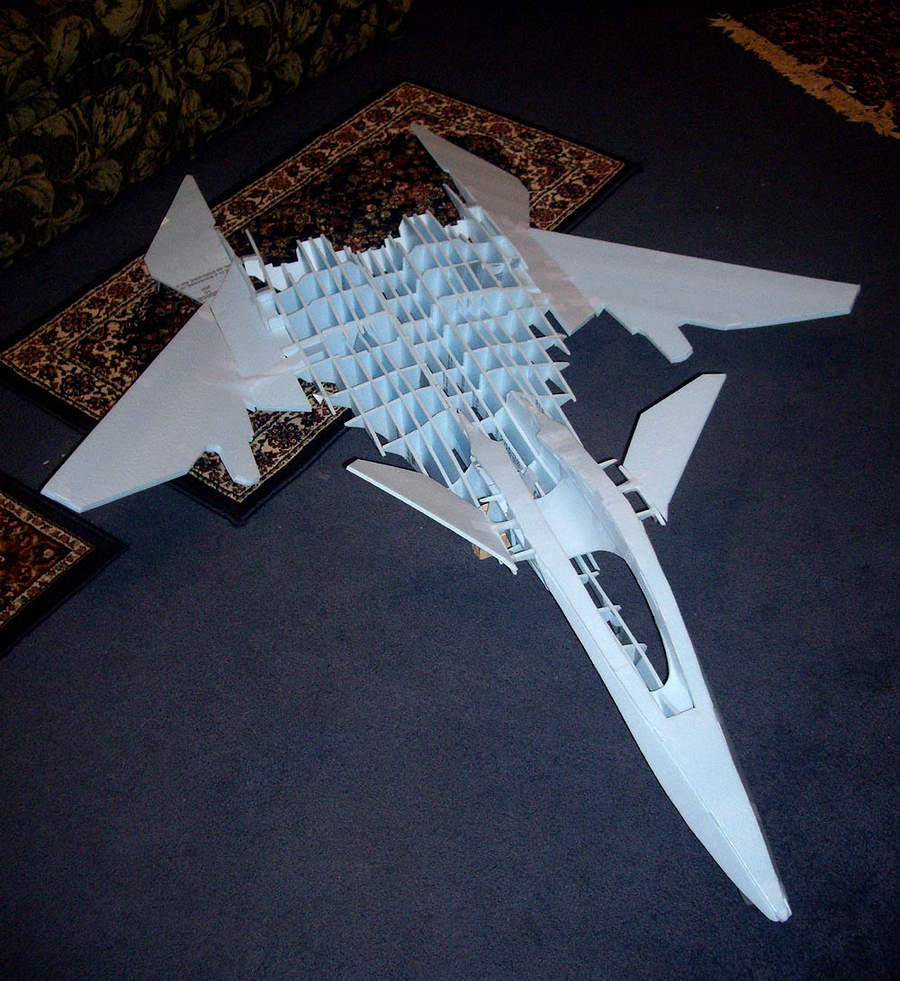
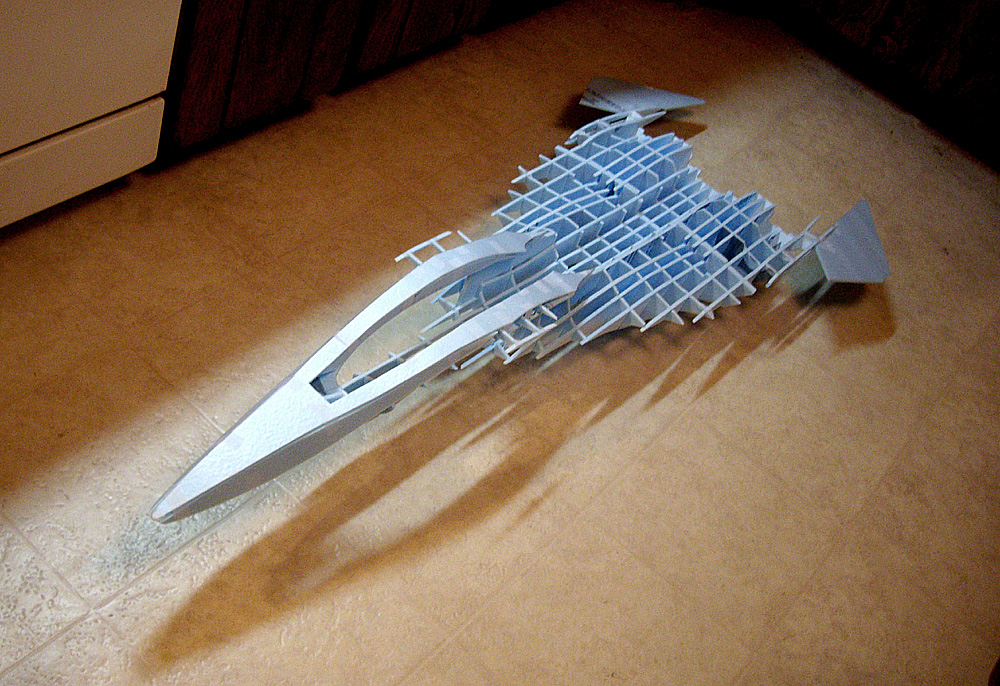
Just an update, the main fuselage is framed up, waiting to be glued. I'll post pictures later today. (Going to try and get the nose done for the first photos.)
~Luke
-
Heheh... Sorta. The real issue is the lack of vertical stabilizers... There's plenty of wing, but the nacelles are about it for vertical surface area. (There are some small fins at the back, alongside the nacelles, which I'm going to make the most of.) I'm planning on using a gyro and differential throttle to help tame it a bit.
Having said that, I've been flying a chuck-glider version, and it seems to be OK.
~Luke
-
Well, months later... Guess what, I'm not building either...
I'm going to break ground (cut foam, what have you) tomorrow on a 63" long FRX-99 RAFE (Yukikaze, obviously.) It's a prop-jet, nothing fancy there, but it is going to use a different construction technique than I used on the SVs, which should produce lighter airframes that are still reasonably strong. (This was a major reason the big SV never moved forwards, I wasn't satisfied with the projected thrust/weight ratios with the ducted fans.) The framework will be assembled and covered with 0.2" thick sheet foam. This should also minimize the amount of carving I have to do, too, which is a bonus. I'm thinking it could also be a little quicker, which is always a good thing. Obviously, should it work out, SVs/VFs are in the lineup, since I have the surface models I need to get the cross-sections.
~Luke


-
But the VF2SS is such an aerodynamic clunker! It looks like a robot in an airplane costume!
~Luke
-
I thought the inboard panels were Fowler flaps anyway? (Like an F-14.) They wouldn't be used for pitch control. In any case, with the wings fully swept (high speed config.) my assumption would be that more than enough control could be derived from the surfaces out near the tip, due to higher airspeed. Plus, with the wings in full sweep, the pitch moment arm would be longer, allowing a smaller surface to provide adequate control.
Do I have to build a lineart-accurate 1/12 scale RC VF-1 to demonstrate?
~Luke
-
I don't see why the VF-1 can't be considered a flying wing, plain and simple... I've been building autonomous UAVs for the last couple years, and I've been using plank-type flying wings the whole time... (See attached.) Unswept wings, with elevons along the back. With the correct airfoils and CG, they have neutral pitch stability, and are a lot of fun to fly in manual mode. (In autonomous/FBW mode, they're completely stable, of course... You just stand there while the flight plan executes, watching a laptop for system messages/faults. "Don't take your eyes off that monitor!")
I've also flown more conventional swept flying wings, which work well, too... Basically, these configurations bracket the range of sweep the VF-1 exhibits. By extension, the VF-1 doesn't need thrust-vector, verniers, or even FBW in order to be controllable/flyable, as long as the CG stays within the required range during wing actuation. (FBW becomes necessary if you move the CG back, to optimize combat maneuverability... Same for thrust-vector; not needed, but it makes it fight better.)
~Luke


-
It has enough wing area, in the grand scheme of things, even aside from any lifting body effects. Since lift = 1/2 Coeff. of lift * Atm density * wing area * Vel^2, airspeed offsets lack of wing area very easily, given the vel^2 factor*. Granted, your stall speed might be high, but that's why it has flaps and GERWALK. With the squared-off arms, bleed-air intakes, etc, you have lots of drag at high speed, but fortunately, thrust offsets drag, and the VF-1 has plenty of thrust.
It's FBW/FBL, and there are plenty of control surfaces to work with. It would be controllable.
Thus, it'll fly just fine. Not efficiently, but in an aircraft with thermonuclear engines, does it really matter?
~Luke
*If this has enough lift (with a relatively lousy T/W ratio, to boot) then the VF-1 can't go wrong; more wing, higher aspect ratio, and more thrust for the win.







{kind=link}
Agents of S.H.I.E.L.D.
in Anime or Science Fiction
Posted
Yeah, I liked Agent Coulson in the movies, but unfortunately, it would seem that dying turned him a bit touchy-feely, at least for a suit.
Ditto on the kid's-show dialog... I mean, I'm not asking for Shakespeare here (or the Sopranos), but come on... Same for the raft-in-the-hole...
Also, maybe this is just my having worked with UAVs/quadrotors too long, but: toy-looking quadrotors. Having quads isn't inherently bad, but these seriously look like something you buy at Toys R Us. Given that they're in the same world as Stark, the helicarrier, etc, you'd think that they could have tiny Oblivion drones, or anything that doesn't look like what they've got. And an interface that isn't a crime against humanity. A 3-panel folding touchscreen? Which dedicates an entire screen to a picture OF THE AIRCRAFT YOU'RE FLYING?!? -- Of course, the Helicarrier had something similar, so... Maybe that's just being consistent.
Anyway, one more for me, I had planned on doing the 4-episode trial, but at this point, I don't think I can take more than three.
-Luke