

arbit
-
Posts
2597 -
Joined
-
Last visited






arbit's Achievements
")
Alaska Base Survivor (10/15)
936
Reputation
-
Very nice photography. What's your set up?
-
I check in for a minute to see what's up, and all I see is a masterpiece. Very nice dirt on that.
-

The 'Hey look at this really cool model build I saw' post
arbit replied to Shawn's topic in Model kits
Just how do they do it? Beautiful. -
Don't know what it is, but looks pretty menacing.
-
A truly talented artist. I am assuming you are a pro? Beautiful work.
-
@Bolt @Urashiman I had one more idea for you.

-
What a beautiful plane. Reminds me of some Miyazaki airships.
-
Maybe you are using auto supports? I can't really trust those. The model looks too complex to print in one part, or just a few parts. For example, I would want those legs to be several parts in order to support the print well enough to preserve the details and get a smooth finish. Another possible issue in the orientation and supports. We would need to see images of your supports to give you more feedback.
-
@Bolt @Urashiman Done. This is about as far as I will go with it.
-
Okay. This is WIP.
-
Thanks for the feedback. I have made some adjustments to Isamu's face as you recommended. Other than fixing glaring problems, I am not a perfectionist. As you said, these are intended for small scale, not professional level figures.

-
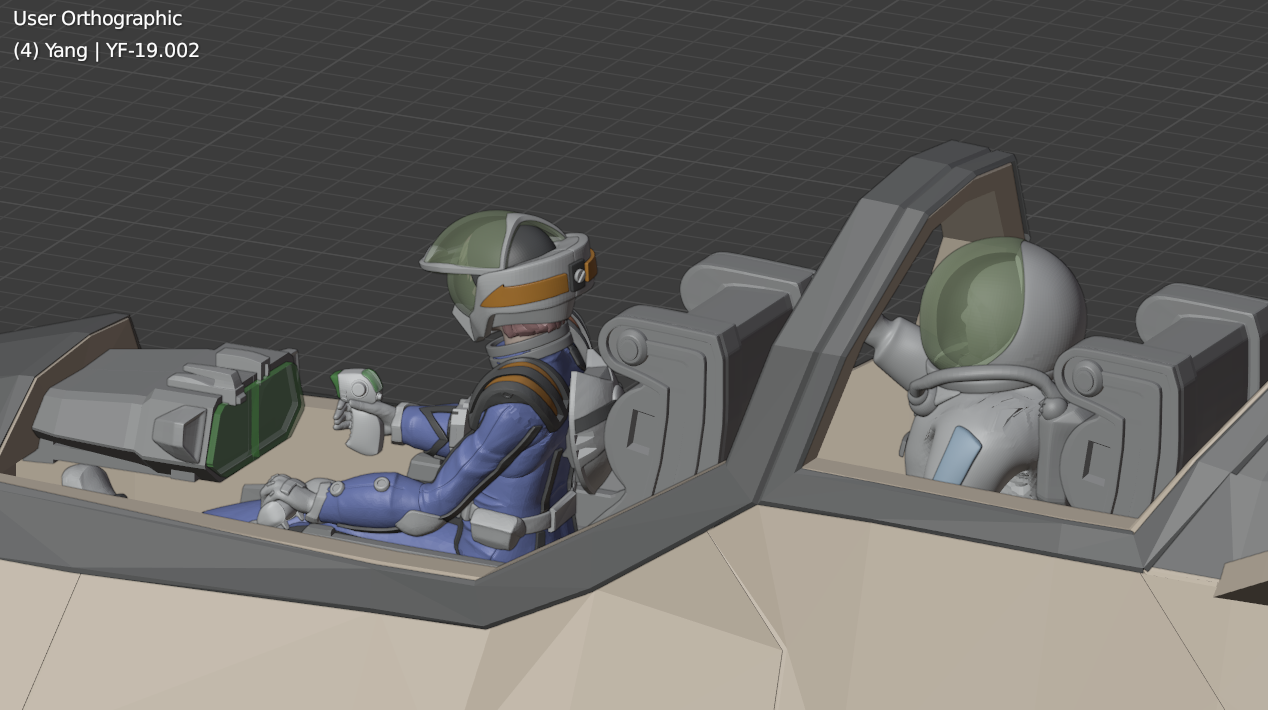
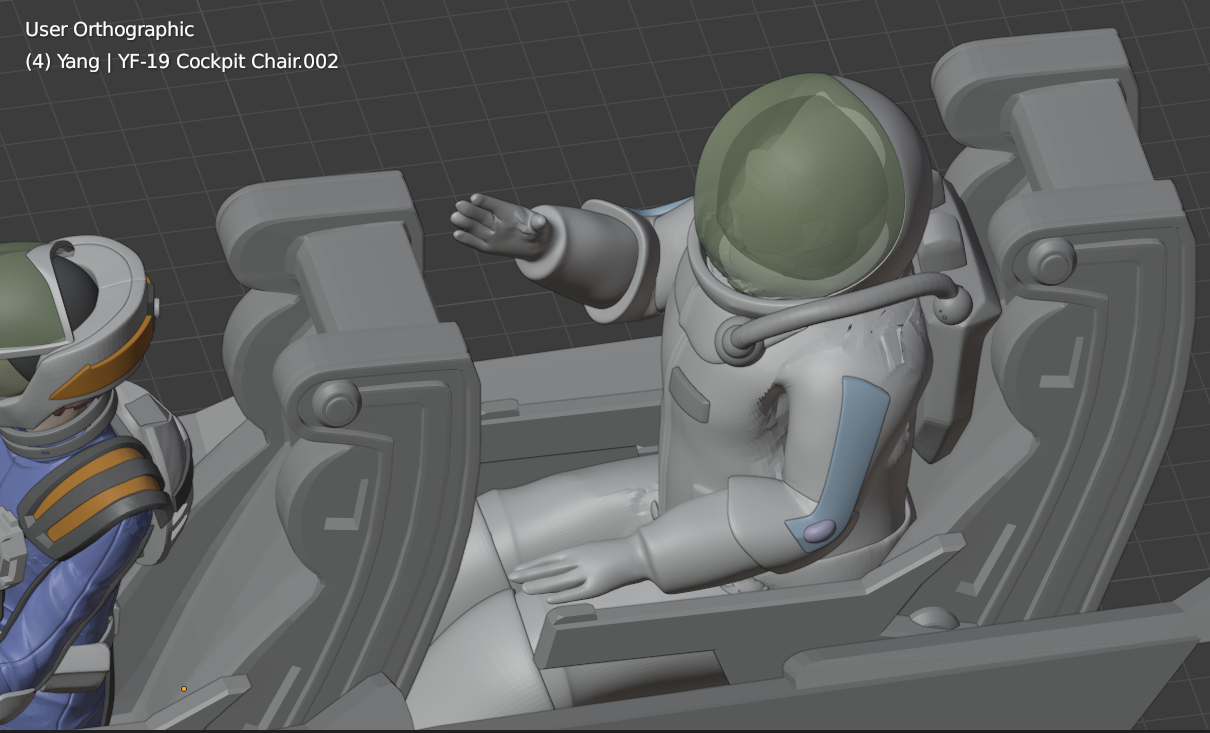
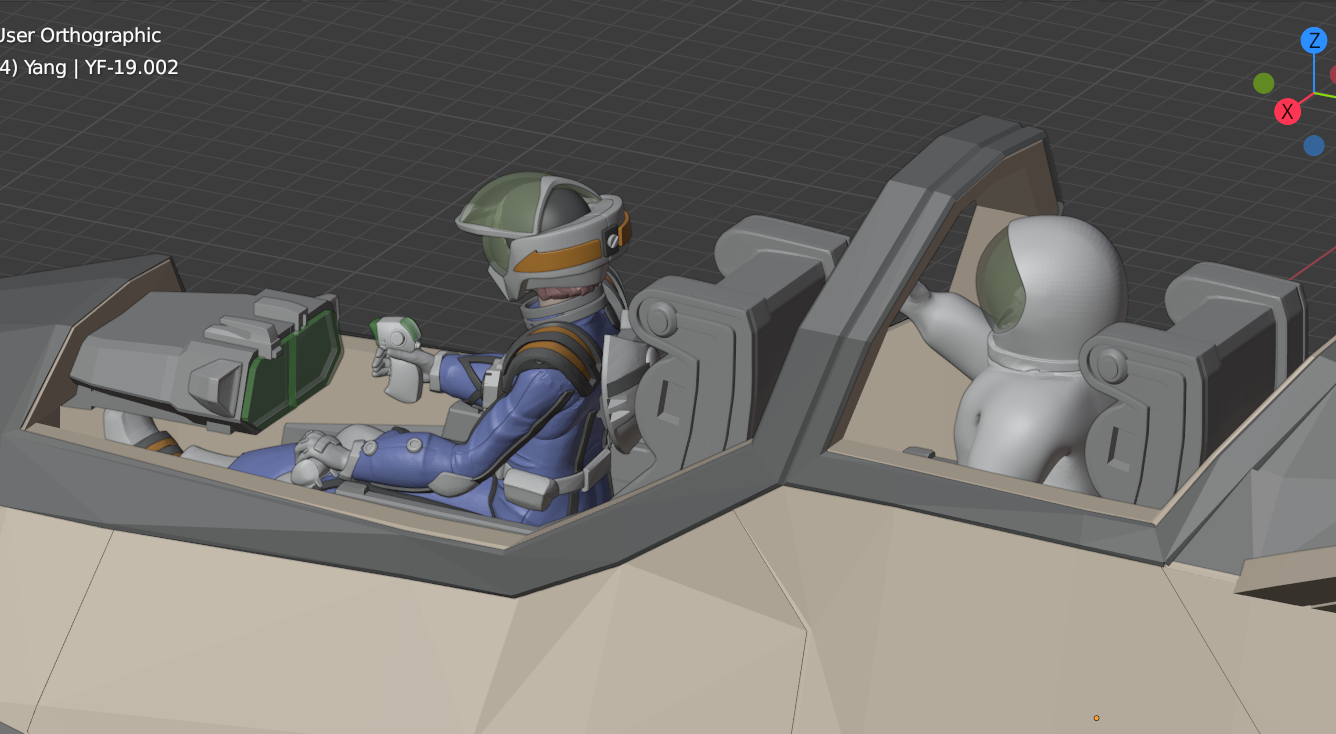
Geeking out with Guld's helmet.

-
Nice photos. Lots of cool details for the next step.
-
Can't wait to have this guy next to my 21.


-
This is WIP. If you are like me, you always want a Guld next to your CM's Isamu.

